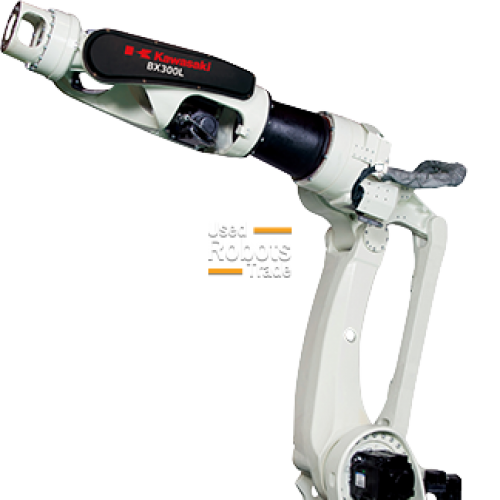
Kawasaki BX250L
Roboterdetails
Der Kawasaki BX250L- Roboter ist Teil der B-Serie und wurde mit fortschrittlicher Technologie entwickelt, um bei Punktschweißanwendungen eine hohe Leistung zu erzielen. Er verfügt über einen großen Bewegungsbereich und eine erhöhte Nutzlastkapazität sowie ein kompaktes Design, das den Arbeitsbereich maximiert. Sein internes Verdrahtungssystem im Arm und seine Hightech-Motoren optimieren Bewegungssteuerung und Leistung und gewährleisten Robustheit und Geschwindigkeit unter anspruchsvollen Arbeitsbedingungen.
Controller E
E-Controller sind kompakt, zuverlässig und leistungsstark und mit fortschrittlicher CPU-Technologie ausgestattet, die die Produktivität und die Pfadsteuerung verbessert. Dank der Kawasaki AS-Technologie, die eine Programmiersprache für die sequentielle Steuerung verwendet, unterstützen sie eine Vielzahl industrieller Anwendungen. Darüber hinaus ermöglichen sie die Erweiterung auf bis zu 10 externe Achsen und ermöglichen so die vollständige Steuerung von bis zu 16 Achsen. Ihr modulares Design und die begrenzte Verkabelung erleichtern Wartung und Diagnose.
- Ideal für die Primärspannungsverteilung in verschiedenen Regionen.
- Erhöhte Erweiterungskapazität.
- Geschlossene Struktur mit indirektem Kühlsystem.
- Digitales Servosystem.
- E/A-Kanäle: 32 (max. 128).
Die Kombination aus dem BX250L-Roboter und seinem E-Controller bietet eine effiziente und vielseitige Lösung für industrielle Schweißanwendungen.
Roboteranwendungen
- Drücken Sie Tending
- Be- und Entladen von Teilen
- Bearbeitung
- handhabung-von-teilen
- Polieren
- Lichtbogenschweißen
- Punktschweißen
- Palettieren
- Messung
- Laser schneiden
- Laserschweißen Nd-Yag
- Kleben - Kleben
- Montage von Teilen
- Bolzenschweißen
- Plasmaschneiden
- Punktschweißen
- Mahlen
Hauptspezifikationen
Maximale Belastung des Roboters: 250 kg
Anzahl der Achsen: 6
Maximale horizontale Reichweite: 2.812 mm
Wiederholgenauigkeit: ± 0,2 mm
Controller: E32
Bewegungsbereich (°)
Achse JT1: ±180°
Achse JT2: +76°/-60°
Achse JT3: +90°/-120°
Achse JT4: ±210°
Achse JT5: ±125°
Achse JT6: ±210°
Maximale Geschwindigkeit (°/s)
Achse JT1: 125°/s
Achse JT2: 120°/s
Achse JT3: 100°/s
Achse JT4: 140°/s
Achse JT5: 140°/s
Achse JT6: 200°/s
Roboteranwendungen
Reibpunktfügen
Maschinenbedienung
Materialhandhabung
Materialabtrag
Punktschweißen
{kind=link}